22 desembre 2022 | Publicat per Editorial Team GRETEL
Celebració de la 14a edició de la International Conference on Social Robotics (ICSR2022) a Florència
A Florència s'ha celebrat, del 13 a 16 de Desembre la 14a edició de la International Conference on Social Robotics (ICSR2022) [https://www.icsr2022.it/]. Selene Caro ha anat a presentar el treball realitzat conjuntament amb el Marc Espuña i la Raquel Ros, titulat 'Expanding the use of robotics in ASD programs in a real educational setting'.

Aquest treball s'ha realitzat a La Salle La Seu d'Urgell, on disposen del SIEI (Suport Intensiu Escolarització Inclusiva). L'escola va contactar amb La Salle - URL ja que disposen d'un robot NAO i volen desenvolupar activitats per als seus estudiants amb necessitats especials, sent els alumnes amb Trastorn de l'Espectre Autista (TEA) on s'ha posat focus. Per tant, aquest article explica la primera activitat que s'ha realitzat en aquesta escola, on es va decidir replicar una activitat ja existent dissenyada especialment per nens amb TEA (Wainer, J., Dautenhahn, K., Robins, B. et al. A Pilot Study with a Novel Setup for Collaborative Play of the Humanoid Robot KASPAR with Children with Autism. Int J of Soc Robotics 6, 45–65 (2014). https://doi.org/10.1007/s12369-013-0195-x). Aquesta activitat serveix com a base per a poder veure com treballen les educadores amb els nens i, així, poder desenvolupar activitats que puguin utilitzar a les seves sessions diàries. La finalitat de dites activitats és que es puguin utilitzar també en altres escoles amb les mateixes necessitats. Aquesta última part és el que és conegut com el projecte DivInTech (Diversitat, Inclusió i Tecnologia).
Els participants de l'estudi són quatre nois de 5, 6, 12 i 14 anys, així com tres educadores.
En l'estudi del Wainer, han desenvolupat una activitat on un nen interacciona o amb una persona (estranya per al nen, és a dir, que no la coneixia abans) o amb un robot. La finalitat del joc és eliminar totes les figures de la pantalla, havent de cooperar els dos jugadors. Cada jugador controla una de les barres (la blava o la vermella) i la intersecció (zona groga) és on hi ha el 'cursor'.
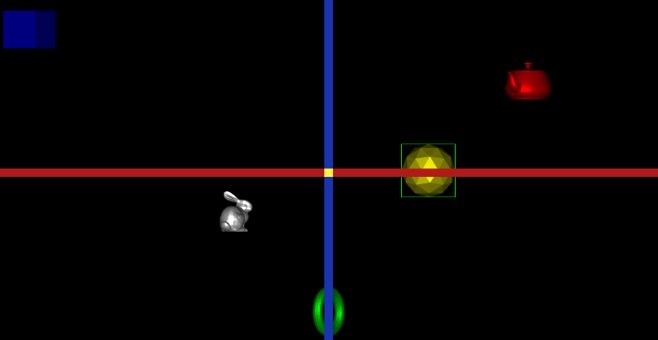
Per a eliminar la figura, han de pressionar un botó que tenen en les seves consoles simultàniament. Per tant, hem creat dos consoles (una per a cada barra). Les consoles tenen, a part de les fletxes a la part dreta per a controlar les barres, el botó S o Seleccionar, per a indicar a l'altre jugador la figura seleccionada per a eliminar, i el botó E o Eliminar, que han de pressionar simultàniament en les dos consoles per a eliminar la figura.

El NAO, com que no pot pressionar tecles, té un pal que sols indica, amb el seu color, la barra que controla. Per a indicar quan pressiona el botó E o Eliminar, baixa ràpidament el braç.

En el nostre cas, hem adaptat el treball del Wainer dins del context de l'escola i amb els objectius que nosaltres volem treballar. Així doncs, en el nostre cas, en lloc de ser una persona desconeguda pel nen, les sessions s'han realitzat amb les educadores del centre per a veure com interactuen amb els nens.
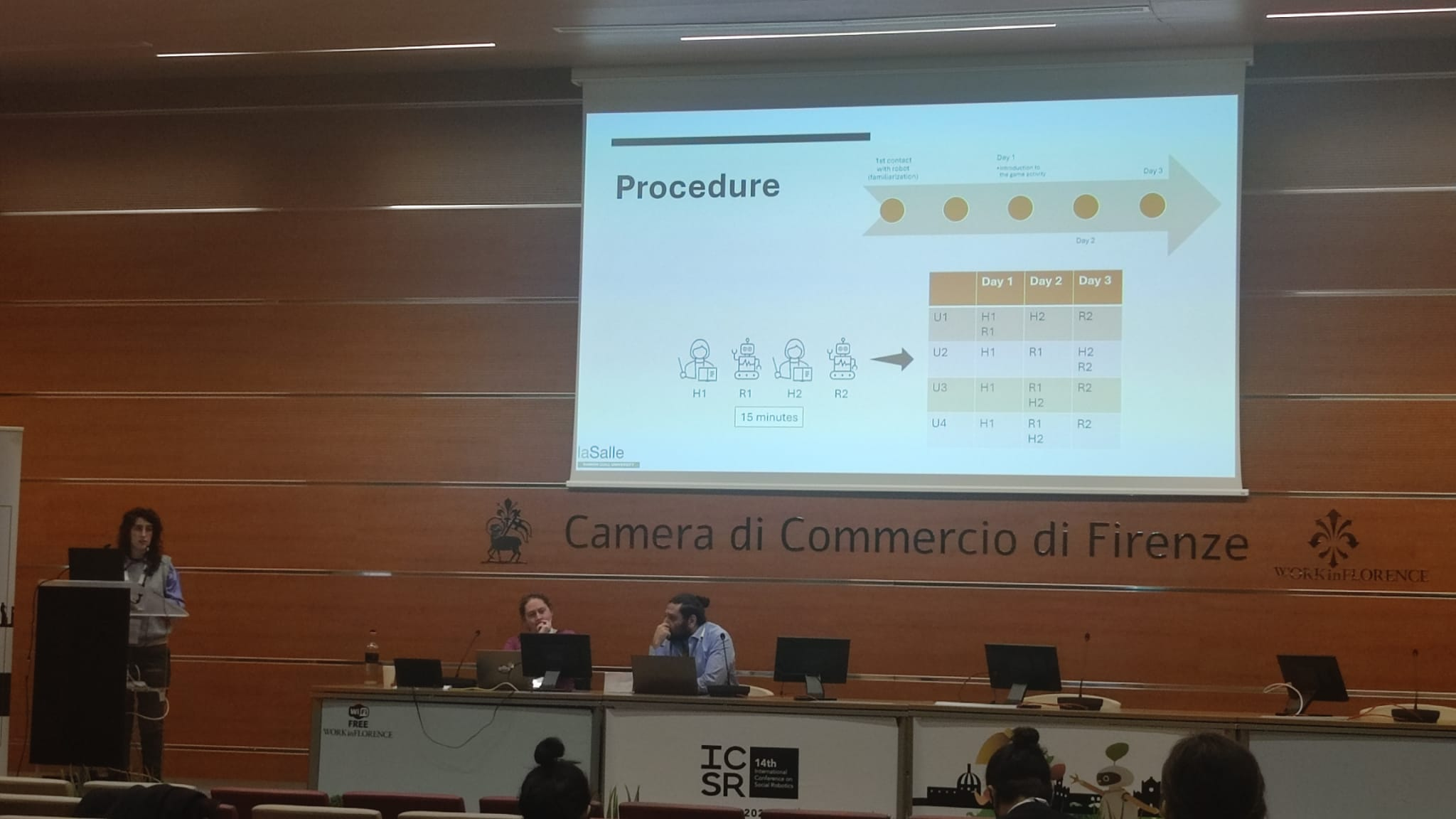
Els nens del SIEI han conegut el NAO dos dies abans a la primera sessió per a que tinguin un primer contacte amb el robot.
També seguint el treball del Wainer, cada nen ha fet quatre sessions, on l'educadora i el robot s'han anat alternant (H1, R1, H2 i R2), fent un total de dos sessions amb l'educadora i dos sessions amb el NAO. Cada sessió té una durada de 15 minuts.
Els nens del SIEI han conegut el NAO dos dies abans a la primera sessió per a que tinguin un primer contacte amb el robot.
També seguint el treball del Wainer, cada nen ha fet quatre sessions, on l'educadora i el robot s'han anat alternant (H1, R1, H2 i R2), fent un total de dos sessions amb l'educadora i dos sessions amb el NAO. Cada sessió té una durada de 15 minuts.
Després d'un anàlizi qualitatiu, la conclusió principal extreta del treball és que la personalització és un factor clau per a la interacció amb el robot. Podent-la millorar:
- Dir el nom del nen per a millorar la seva atenció quan el robot li parla.
- Decidir amb el nen com coordinar-se i, per tant, donar espai per al diàleg entre el robot i el nen.
- Incloure més feedback motivacional que no siguin només verbals (per exemple, xocar els cinc, aplaudir...).
- Personalitzar el joc en funció de les preferències del nen.
- Tenir un espai pel diàleg amb les educadores per a entendre quin aspecte volen treballar amb el nen, ja que cada nen és diferent i s'ha de tenir en compte les seves necessitats.
La presentació d'aquest treball va ser el Dimecres a les 17:09, formant part dins de la sessió 5, titulada 'Social robots as advanced educational tool'. Es va realitzar a l'Auditori de la Cambra de Comerç de Florència.