22 Diciembre 2022 | Publicado por Editorial Team GRETEL
Celebración de la 14ª edición de la International Conference on Social Robotics (ICSR2022) en Florencia
En Florencia se ha celebrado, del 13 a 16 de Diciembre la 14ª edición de la International Conference on Social Robotics (ICSR2022) [https://www.icsr2022.it/]. Selene Caro ha ido a presentar el trabajo realizado conjuntamente con Marc Espuña y Raquel Ros, titulado 'Expanding the use of robotics in ASD programs in a real educational setting'.

Este trabajo se ha realizado en La Salle La Seu d'Urgell, donde disponen del SIEI (Apoyo Intensivo Escolarización Inclusiva). La escuela contactó con La Salle – URL ya que disponen de un robot NAO y quieren desarrollar actividades para sus estudiantes con necesidades especiales, siendo los alumnos con Trastorno del Espectro Autista (TEA) donde se ha puesto foco. Por tanto, este artículo explica la primera actividad que se ha realizado en esta escuela, donde se decidió replicar una actividad ya existente diseñada especialmente para niños con TEA (Wainer, J., Dautenhahn, K., Robins, B. et al En Piloto Study con el Novel Setup para la Colaborativa Play de Humanoid Robot KASPAR with Children with Autism. -x). Esta actividad sirve como base para poder ver cómo trabajan las educadoras con los niños y así poder desarrollar actividades que puedan utilizar en sus sesiones diarias. La finalidad de dichas actividades es que puedan utilizarse también en otras escuelas con las mismas necesidades. Esta última parte es lo que se conoce como el proyecto DivInTech (Diversidad, Inclusión y Tecnología).
Los participantes del estudio son cuatro chicos de 5, 6, 12 y 14 años, así como tres educadoras.
En el estudio del Wainer, han desarrollado una actividad en la que un niño interacciona o con una persona (extraña para el niño, es decir, que no la conocía antes) o con un robot. La finalidad del juego es eliminar todas las figuras de la pantalla, debiendo cooperar a los dos jugadores. Cada jugador controla una de las barras (la azul o la roja) y la intersección (zona amarilla) es donde se encuentra el 'cursor'.
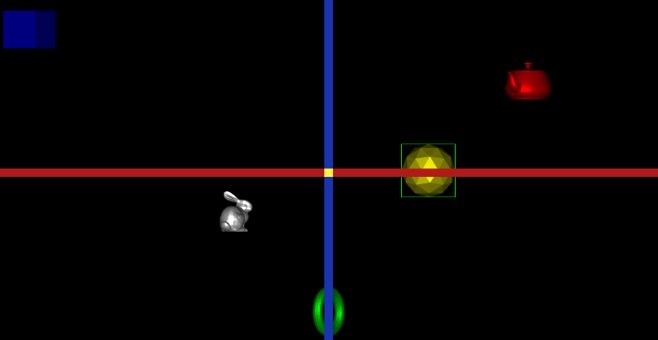
Para eliminar la figura, deben presionar un botón que tienen en sus consolas simultáneamente. Por tanto, hemos creado dos consolas (una para cada barra). Las consolas tienen, aparte de las flechas en la parte derecha para controlar las barras, el botón S o Seleccionar, para indicar al otro jugador la figura seleccionada para eliminar, y el botón E o Eliminar, que deben presionar simultáneamente en las dos consolas para eliminar la figura.

El NAO, al no presionar teclas, tiene un palo que sólo indica, con su color, la barra que controla. Para indicar cuándo presiona el botón E o Eliminar, baja rápidamente el brazo.

En nuestro caso, hemos adaptado el trabajo de Wainer dentro del contexto de la escuela y con los objetivos que nosotros queremos trabajar. Así, en nuestro caso, en lugar de ser una persona desconocida por el niño, las sesiones se han realizado con las educadoras del centro para ver cómo interactúan con los niños.
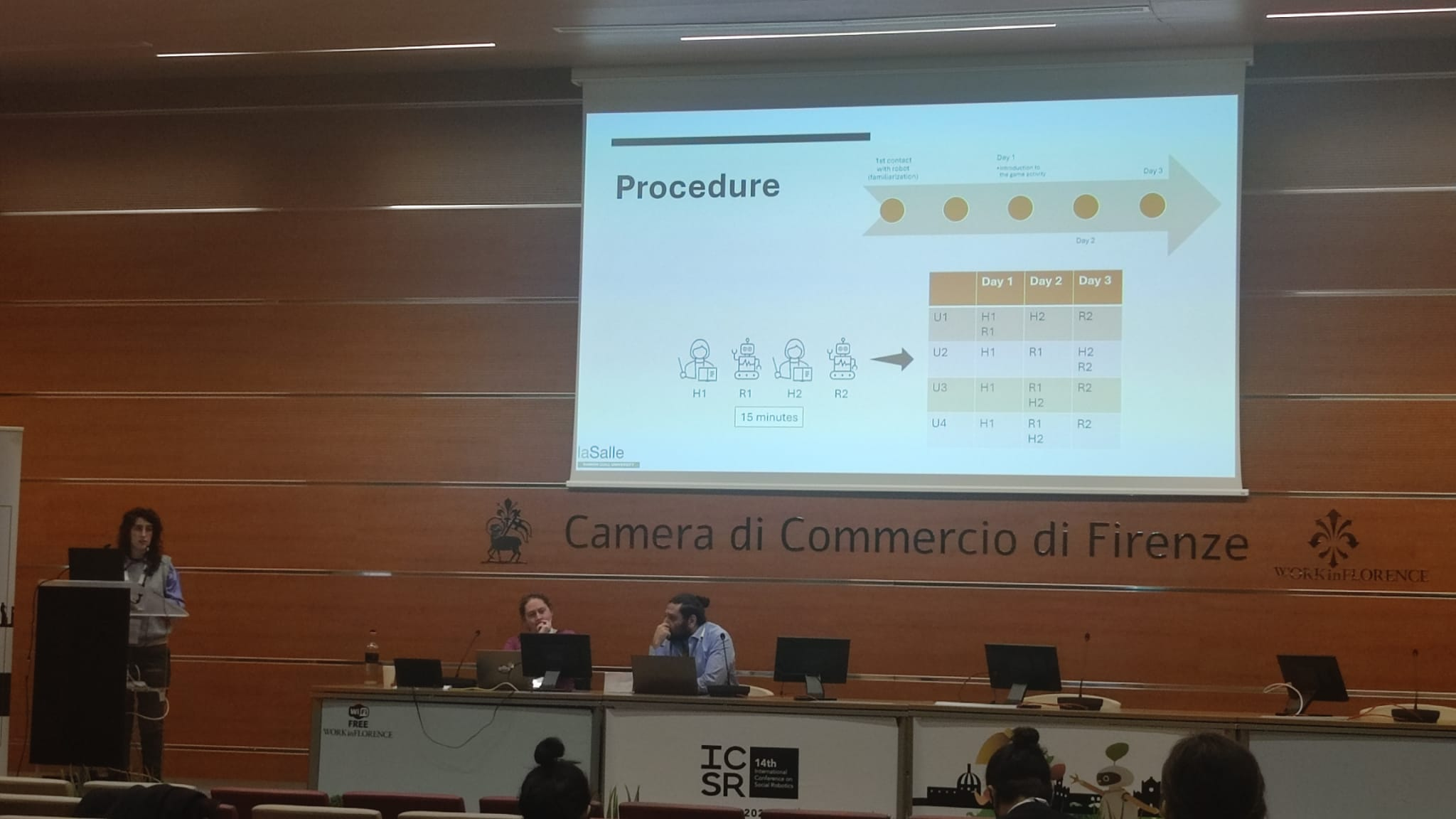
Los niños del SIEI han conocido al NAO dos días antes en la primera sesión para que tengan un primer contacto con el robot.
También siguiendo el trabajo del Wainer, cada niño ha hecho cuatro sesiones, donde la educadora y el robot se han ido alternando (H1, R1, H2 y R2), haciendo un total de dos sesiones con la educadora y dos sesiones con el NAO. Cada sesión tiene una duración de 15 minutos.
Después de un análisis cualitativo, la principal conclusión extraída del trabajo es que la personalización es un factor clave para la interacción con el robot. Pudiendo mejorarla:
Los niños del SIEI han conocido al NAO dos días antes en la primera sesión para que tengan un primer contacto con el robot.
También siguiendo el trabajo del Wainer, cada niño ha hecho cuatro sesiones, donde la educadora y el robot se han ido alternando (H1, R1, H2 y R2), haciendo un total de dos sesiones con la educadora y dos sesiones con el NAO. Cada sesión tiene una duración de 15 minutos.
Después de un análisis cualitativo, la principal conclusión extraída del trabajo es que la personalización es un factor clave para la interacción con el robot. Pudiendo mejorarla:
- Decir el nombre del niño para mejorar su atención cuando el robot le habla.
- Decidir con el niño cómo coordinarse y, por tanto, dar espacio para el diálogo entre el robot y el niño.
- Incluir más feedback motivacional que no sólo verbales (por ejemplo, chocar los cinco, aplaudir...).
- Personalizar el juego en función de las preferencias del niño.
- Tener un espacio para el diálogo con las educadoras para entender qué aspecto quieren trabajar con el niño, puesto que cada niño es diferente y debe tenerse en cuenta sus necesidades.
La presentación de este trabajo fue el miércoles a las 17:09, formando parte dentro de la sesión 5, titulada 'Social robots as advanced educational tool'. Se realizó en el Auditorio de la Cámara de Comercio de Florencia.