22 December 2022 | Posted by Editorial Team GRETEL
Celebration of the 14th edition of the International Conference on Social Robotics (ICSR2022) in Florence
The 14th edition of the International Conference on Social Robotics (ICSR2022) [https://www.icsr2022.it/] was held in Florence from December 13 to 16. Selene Caro has gone to present the work done together with Marc Espuña and Raquel Ros, entitled 'Expanding the use of robotics in ASD programs in a real educational setting'.

This work has been carried out at La Salle La Seu d'Urgell, where they have the SIEI (Intensive Inclusive Schooling Support). The school contacted La Salle - URL since they have a NAO robot and they want to develop activities for their students with special needs, being the students with Autism Spectrum Disorder (ASD) where the focus has been put. Therefore, this article explains the first activity that has been carried out in this school, where it was decided to replicate an existing activity designed especially for children with ASD (Wainer, J., Dautenhahn, K., Robins, B. et al In Pilot Study with Novel Setup for the Humanoid Robot KASPAR Collaborative Play with Children with Autism. -x). This activity serves as a basis for seeing how the educators work with the children so that they can develop activities that they can use in their daily sessions. The purpose of these activities is that they can also be used in other schools with the same needs. This last part is what is known as the DivInTech (Diversity, Inclusion and Technology) project.
The participants in the study are four boys aged 5, 6, 12 and 14, as well as three educators.
In the Wainer study, they have developed an activity in which a child interacts either with a person (a stranger to the child, i.e. not known to the child before) or with a robot. The aim of the game is to eliminate all the figures on the screen, with the two players having to cooperate. Each player controls one of the bars (blue or red) and the intersection (yellow zone) is where the 'cursor' is located.
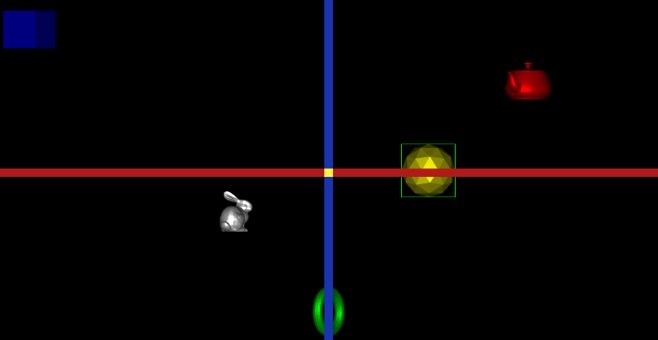
To remove the figure, they must press a button that they have on their consoles simultaneously. Therefore, we have created two consoles (one for each bar). The consoles have, apart from the arrows on the right side to control the bars, the S or Select button, to indicate to the other player the selected figure to delete, and the E or Delete button, which they must press simultaneously on both consoles to delete the figure.

The NAO, not pressing keys, has a stick that only indicates, with its color, the bar it controls. To indicate when it presses the E or Delete button, it quickly lowers its arm.

In our case, we have adapted Wainer's work within the context of the school and with the objectives we want to work on. Thus, in our case, instead of being a person unknown to the child, the sessions have been conducted with the educators of the center to see how they interact with the children.
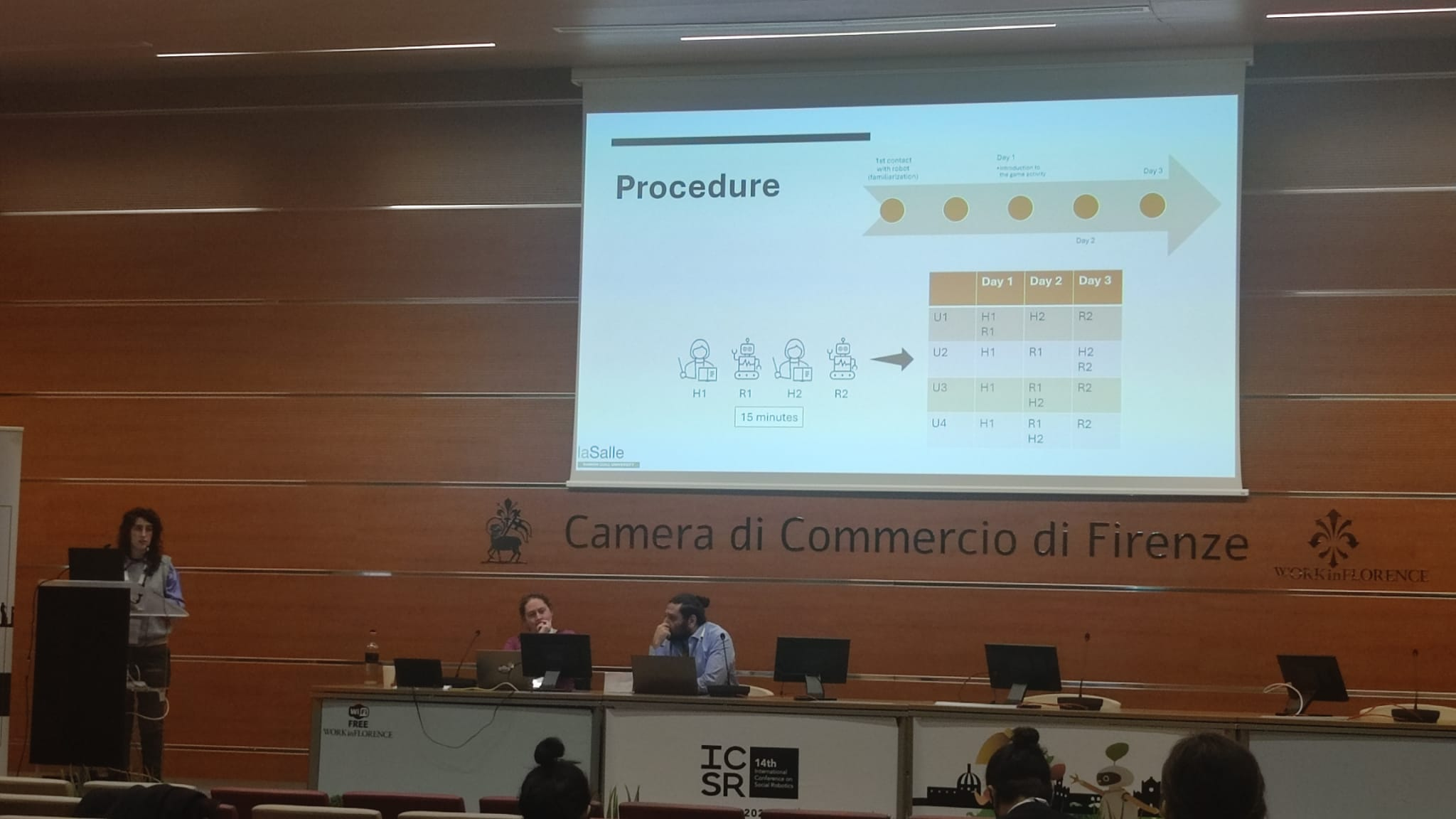
The SIEI children have met the NAO two days before in the first session so that they have a first contact with the robot.
Also following the Wainer's work, each child has done four sessions, where the educator and the robot have been alternating (H1, R1, H2 and R2), making a total of two sessions with the educator and two sessions with the NAO. Each session lasted 15 minutes.
After a qualitative analysis, the main conclusion drawn from the work is that personalization is a key factor for the interaction with the robot. It can be improved:
The SIEI children have met the NAO two days before in the first session so that they have a first contact with the robot.
Also following the Wainer's work, each child has done four sessions, where the educator and the robot have been alternating (H1, R1, H2 and R2), making a total of two sessions with the educator and two sessions with the NAO. Each session lasted 15 minutes.
After a qualitative analysis, the main conclusion drawn from the work is that personalization is a key factor for the interaction with the robot. It can be improved:
- Say the child's name to improve his or her attention when the robot speaks to him or her.
- Decide with the child how to coordinate and thus give space for dialogue between the robot and the child.
- Include more motivational feedback than just verbal (e.g., high fives, clapping...).
- Personalize the game according to the child's preferences.
- Have a space for dialogue with the educators to understand what aspect they want to work on with the child, since each child is different and their needs must be taken into account.
The presentation of this work was on Wednesday at 17:09, as part of session 5, entitled 'Social robots as advanced educational tool'. It was held in the Auditorium of the Chamber of Commerce of Florence.